| Back |
History of radio control
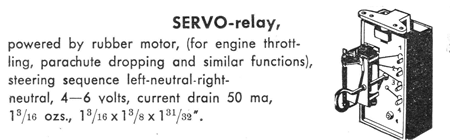
When I started flying in the 1950's there were a few people flying radio control. In those days it was mostly single channel actuator radio. The only control was rudder which was neutral, full left, neutral and full right in turn as you pushed and released the single button. An escapement actuator stepped a half turn on each button press and drove a wire crank moving the rudder. Most used twisted rubber as the motive power. You had full throttle all the time. To carry out a gradual turn the flyer had to set up a rhythm of long left and short right pulses, or vice versa.
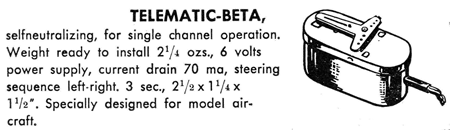
Multichannel RC was coming in but it used an electromagnet in the plane that had springy metal strips of different lengths called reeds. The transmitter sent tones, each of which would cause one reed to resonate and touch a contact. This closed a relay that then switched a 'bang-bang' actuator or a servo for one channel. It was very large and heavy of course and expensive. Now we measure kit in grams but then ounces were used, twenty-eight times as big. Single channel was £15 and eight was up to £50. The average weekly wage then was about £13 compared with £500 now so adjusted prices would be about £600 and £2000. You could build your own for a fair bit less than that, if you could cope with the tuning. There were no crystals so the transmitter used the whole of the 27 MHz frequency band. Only one model could be in the air at a time.

Three-channel reed and relays 1959
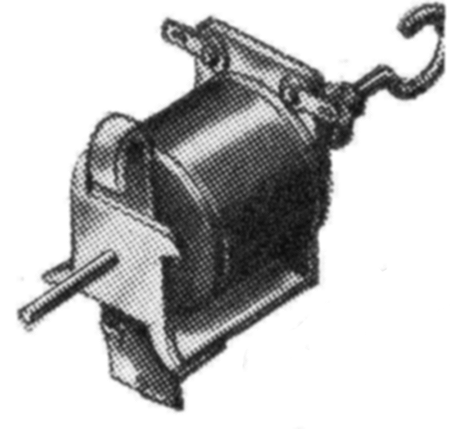
Actuator 1958
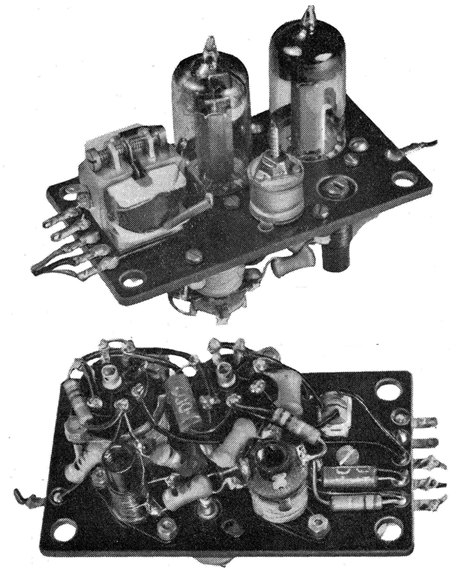
ED Airtrol receiver 1959
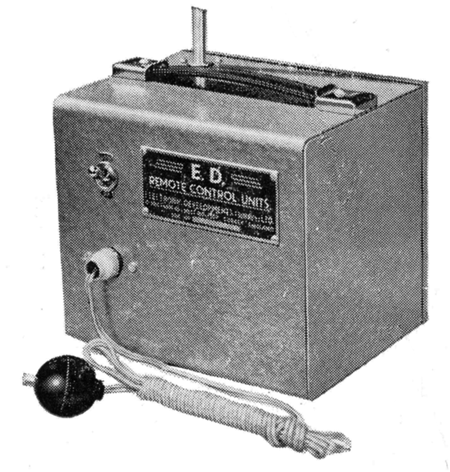
ED transmitter 1958
Hill mark 2 homemade receiver 1959
Home made receiver and Mighty Midget servos
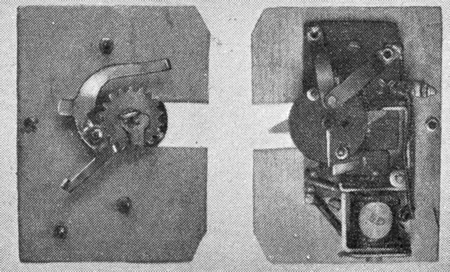
Home modified ED escapement 1958
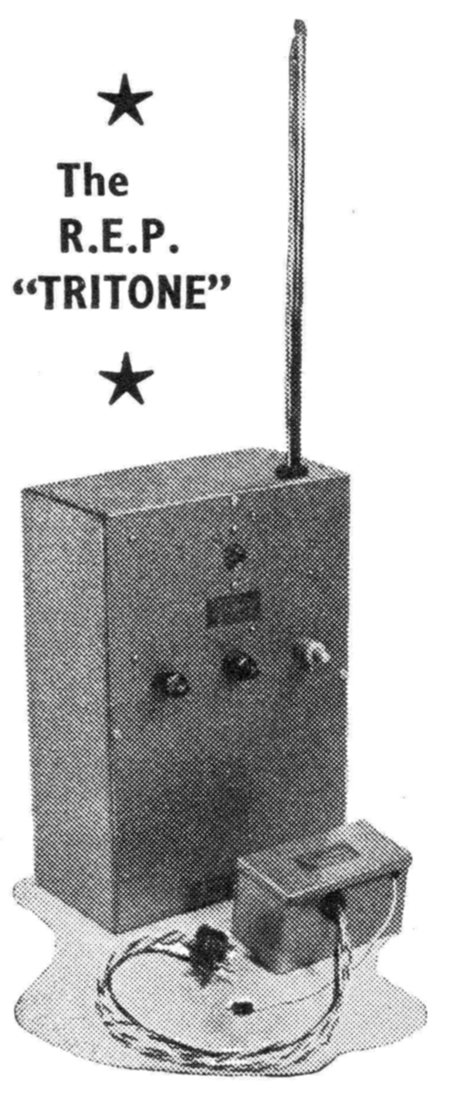
REP Tritone 1959

Ripmax receiver 1958
Graupner servos from 1960
There was an analogue proportional system called Galloping Ghost based on using a relay or valve-based multivibrator mark/space ratio system on Mighty Midget electric motors. One version had two weights on a governor-like gadget that pulled and pushed with different motor speeds. The advent of digital proportional was magical but that was later.
To read more about early radio click:
Digital proportional
I used 35 MHz Futaba proportional kit for my Amigo and Cirrus soarers. When I restarted flying I bought some Spektrum 2.4GHz kit. I was astonished at how far it had advanced. The receivers and servos are tiny and so cheap. It's much better to put aileron and flap servos into the wings. Most impressive of all is the transmitter. It is so programmable. I can store details of 250 models including servo rates, differential and response curves as well as mixes.
Then I read a series of articles in Radio Control Models and Electronics about FrSky ('freesky'). I now use nothing but an Taranis X9D transmitter and X8R receivers. They are inexpensive, have excellent range and allow a wide variety of telemetry. The Tx has a card slot so you can back up model setups and then transfer to computer storage. If you are interested in trying one, read the description on this page and download the manual I have written. It also has an S.BUS socket to allow single wire connections to complex wing setups. You can read about it here.
FrSky uses the radio control equivalent of Open Source. OpenTx is a language for programming a transmitter very flexibly with free software called 'Companion' that enables you to do this on your computer.
I wonder how far to go to automate and simplify flying. You can now buy gyro stabilisers but I think I'll continue to do the work on the sticks.
Micro radio control
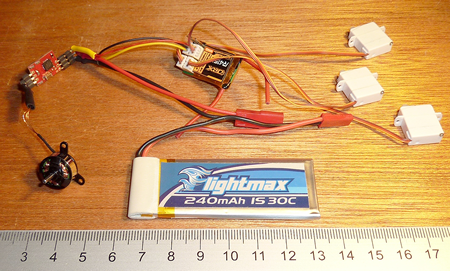
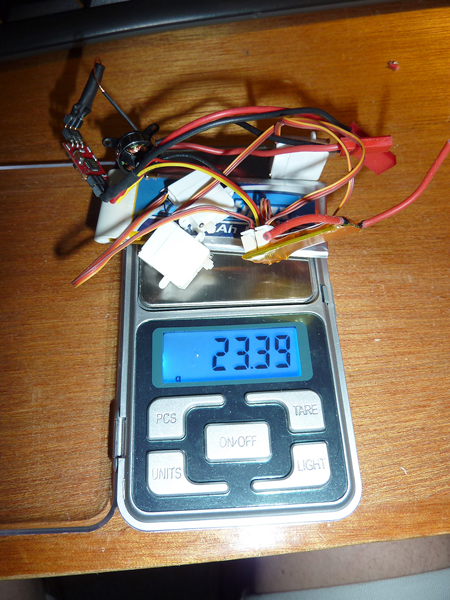
And here is my latest experiment - micro radio control for indoor or calm garden flying. This complete four channel set has a brushless motor, an electronic speed controller (ESC), a receiver, three servos and a lipo battery (shown un-connected). The metric rule shows the size, and the scale below shows the weight in grams. For those non-metric amongst us, there are 28 grams in one ounce.
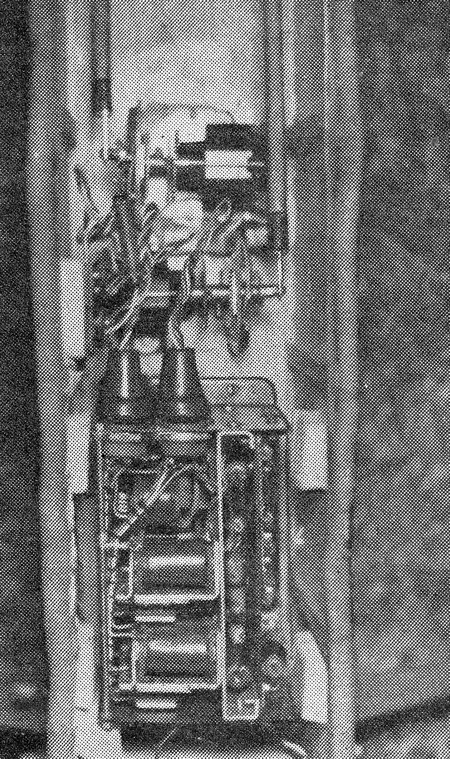
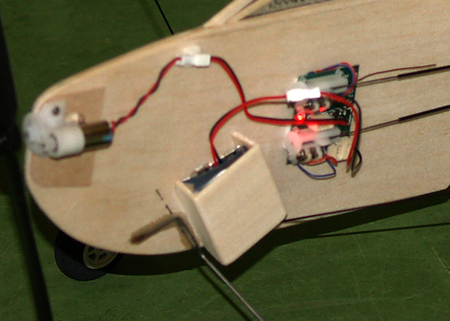
Well, I thought I'd seen the smallest but at Stalham I saw a model that had radio gear that was even smaller. This cropped enlargement is a little burred but you can see the geared motor. The board with the red LED is a combined receiver, speed controller and two linear servos. The servos push the rudder and elevator using carbon fibre tube push rods.
| Back |
(C) Peter Scott 2015
Last edit 29 August 2018